未来,我们生活中的大部分工作将会被机器人取代。这些机器人不应只是冰冷的钢铁机器,而是表面可覆盖有与人体皮肤类似的材料,具备感知运动信息并识别所接触的物体的能力,反馈给机器人做出相应的动作处理,就像人类的双手一样。人工运动和触觉感受器(Artificial motion and tactile receptor, AMTR)是一种能够实时感知物体运动和识别不同材料的智能平台,是交互式人机界面的推动者。目前亟需开发一类有效模仿人体皮肤的组成、结构、力学和多功能性的AMTR。
近期,上海科技大学物质科学与技术学院的凌盛杰课题组开发了一种基于丝素蛋白的离子弹性体(Silk Fibroin Ionoelastomer, SFIE),可以模仿人类皮肤的组成和功能。通过分子结构设计和功能集成的策略,结合机器学习与物联网技术,他们将SFIE集成到机器人的手指上,SFIE- AMTR能够感知运动并准确分类不同材质的物体。在智能分拣、软体机器人和虚拟现实领域具有广泛的应用前景。
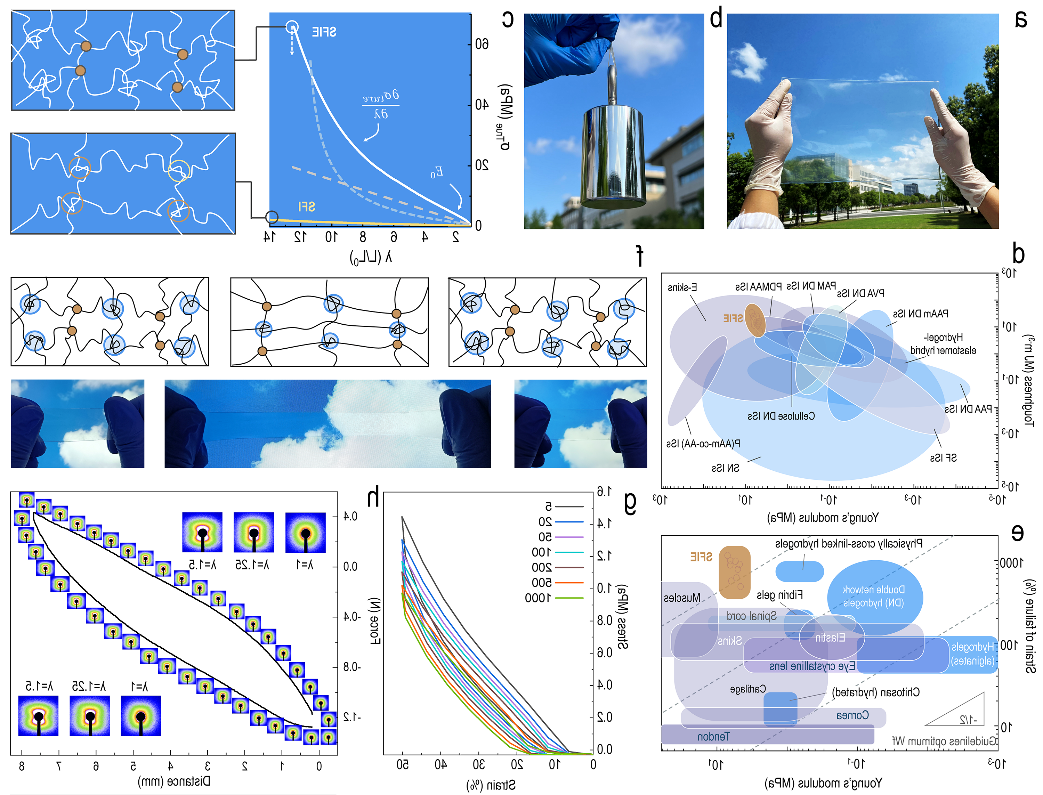
图2 SFIE的力学性能 a)SFIE的透明性展示b)SFIE 的强度展示c)SFIE和SFI的真应力-伸长率曲线(左)和链结构(右)d)SFIE的杨氏模量和韧性与其他代表性软材料的对比。e)SFIE的杨氏模量和失效应变与其他软材料和天然生物材料的对比。f)SFIE 弹性的展示,链结构变化的示意图(上)g)SFIE的循环拉伸曲线 h)SFIE在一个周期内的小角X射线散射图。
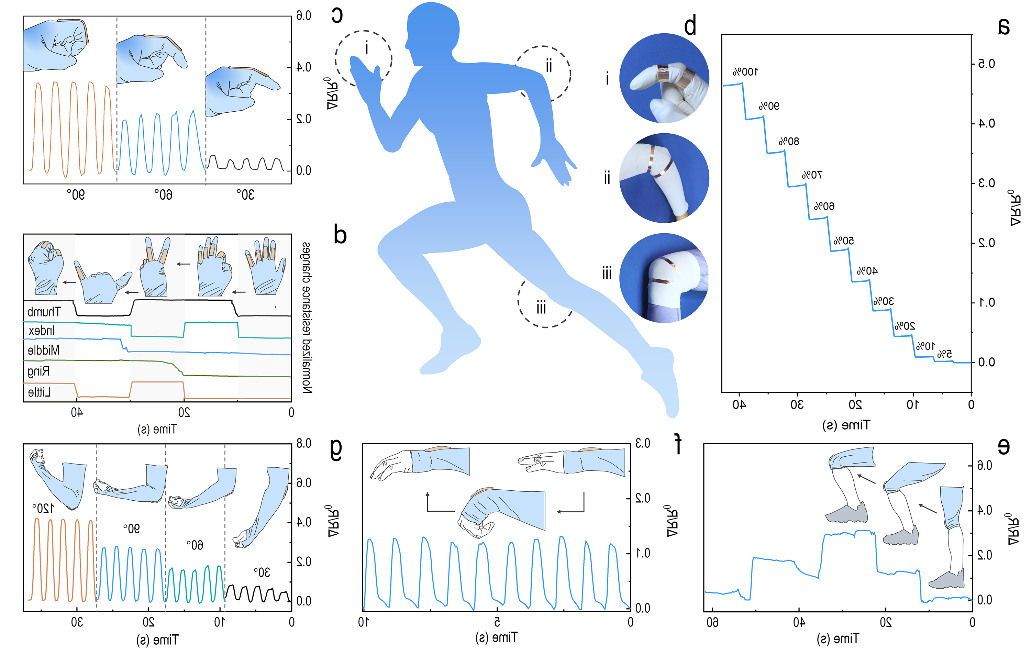
图3 SFIE-AMTR对人体运动的监测 a)SFIE相对于拉伸变形的阻力变化 b)SFIE-AMTR实时监测人体各种运动器官的运动的示意图c)SFIE-AMTR 对手指弯曲的检测 d)SFIE-AMTR对手势的检测 e)SFIE-AMTR对膝盖弯曲的检测 f)SFIE-AMTR对手腕弯曲的检测 g)SFIE-AMTR对手肘弯曲的检测。
原文链接:http://onlinelibrary.wiley.com/doi/10.1002/adfm.202301404
- 东华大学朱美芳院士/潘绍武研究员 Adv. Funct. Mater.:原位成型生物电极实现高度共形、稳定的电生理信号界面 2024-04-30
- 重庆大学蔡开勇/冯茜团队 ACS Nano:基于自编织技术制备的GSH响应性和H?S自生成纳米笼用于优化肿瘤免疫治疗 2024-04-04
- 暨南大学郭瑞研究员团队 AFM:一种新型3D打印双层颅-脑补片用于同时治疗创伤性脑损伤和颅骨缺损 2024-01-24
- KAIST应邬彬、汉阳大学Do Hwan Kim Nat. Commun.:具有动态疏水-水解域的超快水下自修复压电离子弹性体 2024-03-14
- 北京林业大学杨俊 AFM:坚韧、粘附、自修复的无溶剂离子弹性体用于柔性离子器件 2023-10-25
- 东华大学武培怡/侯磊团队《亚博体育》:锂键和氢键协同作用实现无溶剂光子晶体离子弹性体的力学强韧化和传感可视化 2023-03-07
- 西安交大丁书江教授团队 Angew:多重动态键驱动全固态锂电池正极/聚合物电解质一体化 2023-07-14
