二维平面状高分子材料在光、温度、湿度等多种外界刺激下的3D可控变形的研究越来越受到重视,且在软体机器人,柔性器件与传感器等方面潜在应用潜力巨大。然而,将二维(2D)薄膜可控变形为三维形状仍然是一个具有挑战性的问题,这是因为实现聚合物平面内尺寸的可控变化存在难度,往往只能实现零高斯曲率的形变。从目前的研究情况来看,平面片状材料的可控变形主要有两种设计策略,即:厚度方向与平面内的非均匀设计。最经典的厚度方向设计策略通常是由刺激响应性的主动层和非活性被动层双层结构组成。但是通常的双层结构设计只能产生平均曲率的变化,其高斯曲率始终为零。相比于双层结构设计策略,平面内的非均匀设计可以产生高斯曲率和平均曲率的变化。然而,现有的平面内非均匀设计需要复杂的非均匀,或者非连续的材料设计,比如,液晶相取向、切割缝、镂空结构等。因此,这种设计策略的应用也受到一定限制。近年来,也有学者在厚度方向构筑交联密度的非均匀性,同时结合平面内的交联密度图案化设计,从而实现3D可控变形。但是,目前的设计策略都需要材料非均匀性设计,这会明显影响材料的性能与应用。
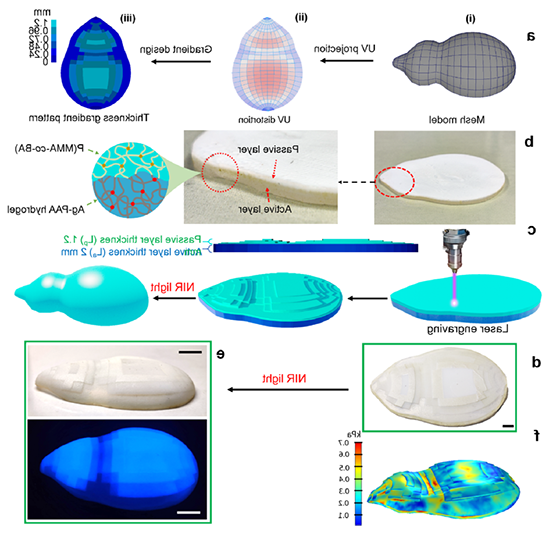
图1. 双层变形材料的厚度梯度设计、制备及3D可控变形的实现
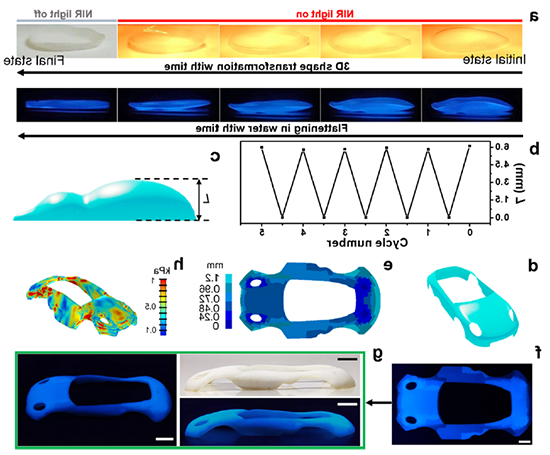
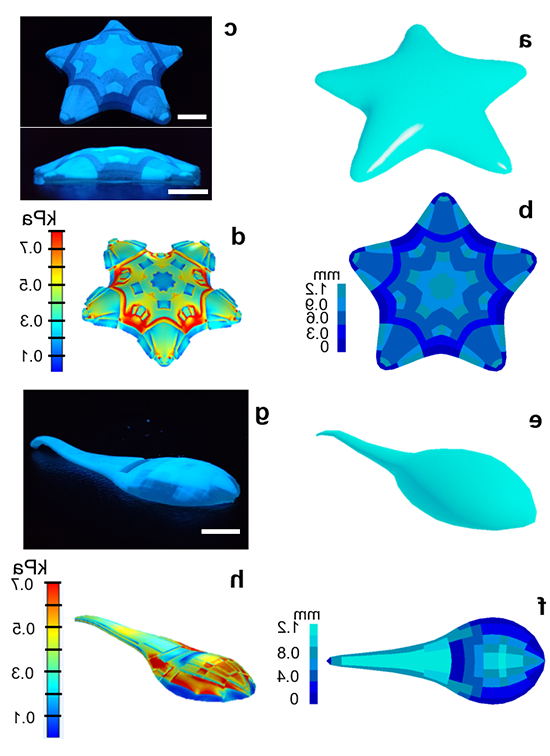
图3. 基于被动层厚度梯度设计的“海星”、“蝌蚪”形态变形。
进一步,作者通过配位键的引入,以及聚合单体比例的调控等方法,改变主动层和被动层的材料性质及几何尺寸等,详细探讨了被动层几何尺寸、子层设计、材料性质、被动层厚度梯度序列以及拓扑特点对3D可控变形的影响。由于此3D变形材料的变形驱动力来源于主动层的脱水收缩,因此该3D变形材料也表现出很好的变形可逆性。利用该UVM-TG设计策略可实现如图2、3所示的多种复杂3D形态,如:跑车、海星、蝌蚪等变形。与其他需要复杂的材料非均匀性或非连续性设计的3D可控变形策略相比,作者提出的UVM-TG设计策略保持了材料的均匀性和连续性,且制备过程简单、高效,变形过程中没有明显的不可控的表面屈曲与褶皱,为软体机器人等方面的应用提供了新的材料设计思路。
以上研究成果以“Biomorphogenesis-Inspired Three-Dimensional Shape Transformation of Bilayer Polymer Sheets”为题发表于Chemistry of Materials(Doi: 10.1021/acs.chemmater.4c00049)。宁波大学材化学院硕士生缑凯与王雷为共同第一作者,通讯作者为宁波大翁更生教授。本研究得到了国家自然科学基金面上项目(22175100),浙江省自然科学基金(LY22E030001)与宁波市自然科学基金(2022J102)的资助。
文章链接:http://pubs.acs.org/doi/10.1021/acs.chemmater.4c00049
- 东华大学武培怡/刘艳军团队 Nat. Commun.:双重降噪且选择性识别人声的仿生鼓膜 2024-10-17
- 中国科大龚兴龙教授课题组 Adv. Funct. Mater.:攀援植物启发的用于过渡复杂表面的多响应仿生驱动器 2024-10-17
- 宁波材料所陈涛/宁波工程学院高国荣等 Angew:海洋变形虫启发的盐化水凝胶的各向异性重构和及其可编程的形变 2024-10-15
- 北科大&北大杨槐/于美娜/王茜团队 JMCA:具有被动辐射冷却和协同太阳光调控能力的智能调光膜 2024-09-10
- 中国科学技术大学、安徽铜峰电子研究团队 Adv. Mater.:γ辐照显著提升聚合物薄膜的介电储能特性 2024-02-23
- 中山大学梁国栋教授课题组 AM:日光激发的小时级超长余辉聚合物薄膜 2024-02-03
